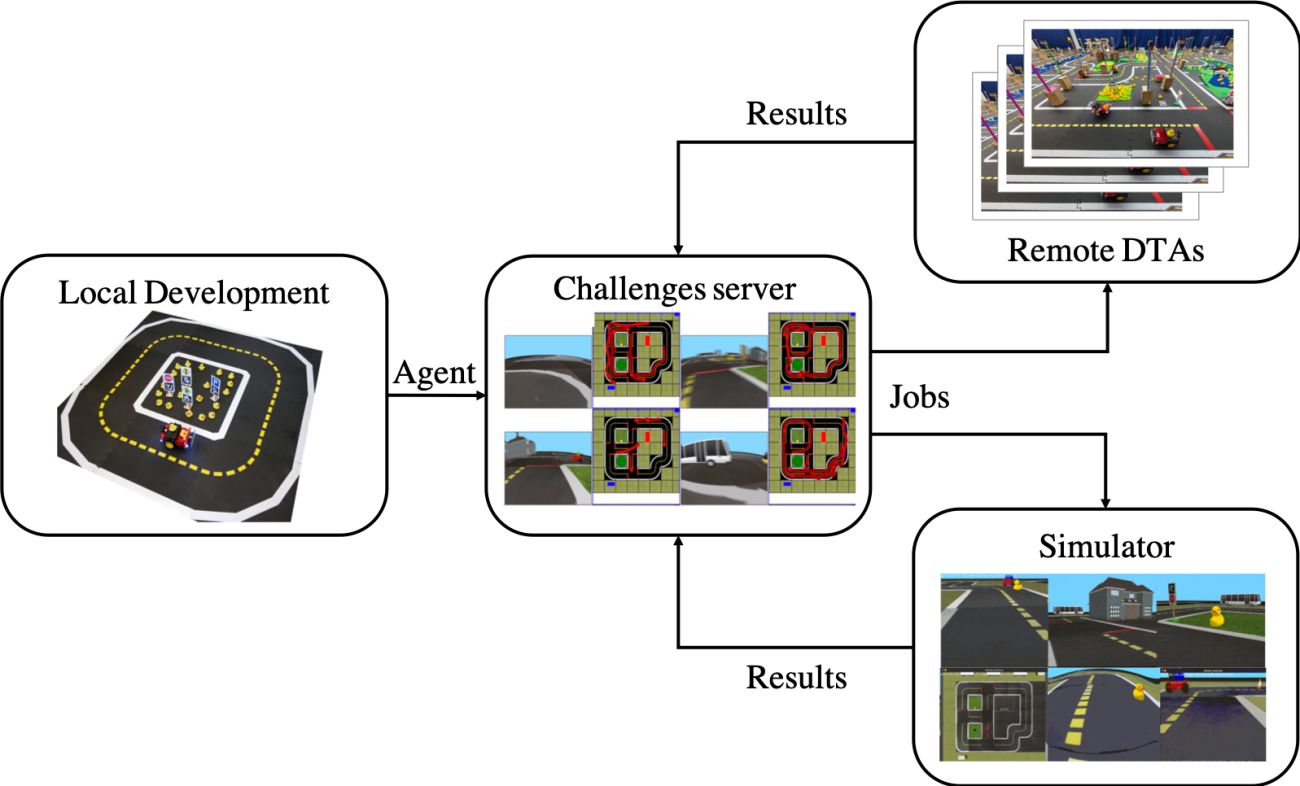
Lane Following (LF), in which you need to follow a lane. Lane Following with Pedestrians Vehicles (LFP), in which you need to avoid the duckie-pedestrians. Lane Following with other Vehicles, multibody (LFV_multi), in which your agent is embodied in multiple vehicles.